Технология будущего. зачем нужен lidar, который появился в ipad pro
LiDAR Sensor Examples
Here at Seeed, we offer a variety of LiDAR sensors. Here are a few of our favourites for those just starting out on LiDAR technology!
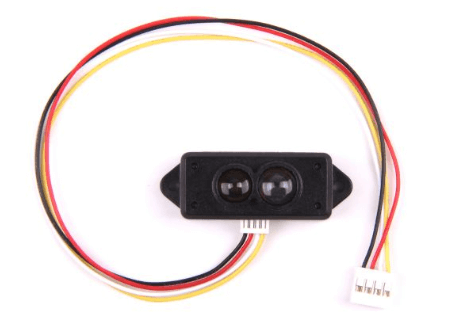
TFmini Plus – ToF LIDAR Range Finder

- This is a small size, low power consumption, single point short-range LiDAR sensor.
- TFmini Plus is a distance sensor of LIDAR which can emit near-infrared ray and measure the phase difference between the emitting ray and reflected ray to calculate the distance through ToF.
- Because of the LIDAR principle, it is hard to give an accurate distance between the transparent objects like water or glass. However, it is still a sensitive distance sensor in measuring the moving object and calculate the distance between the object and TFmini in real-time.
- This distance sensor leaves I2C and UART interface for developers and you can simply plug TFmini through the TTL to USB converter to the PC and get the distance data on your computer.
- As for the software, there is a test software upper computer software of TFmini that you can download to observe the distance changing when the object is moving in real-time.
- Interested in more details? You can check out the datasheet.
- Here is a video of the TFmini Plus in action:
Seeedstudio Grove – TF Mini LiDAR
- The TF Mini LiDAR is based on ToF (Time of Flight) principle and integrated with unique optical and electrical designs, so as to achieve stable, precise, high sensitivity and high-speed distance detection.
- ToF is the abbreviation of Time of Flight technology, and its operating principle is as follows: a modulated near-infrared light is sent from the sensor and reflected by an object; the distance to the object to be shot can be converted with the sensor by calculating the time difference or phase difference between the light sending and the light reflection, so as to produce the depth information.
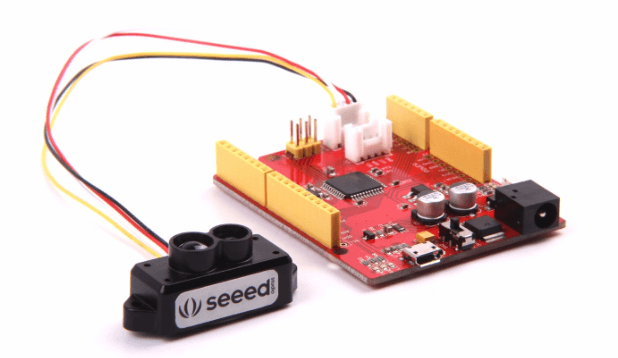
- Using one of our Seeeduinos? You can easily plug them in through one the Grove Serial Interfaces and get started!
- Here is a video of it in action:
Intel RealSense LiDAR Depth Camera L515

Require a small yet high performing LiDAR sensor? This new Intel RealSense LiDAR Depth Camera L515 will be perfect!
The Intel RealSenseTM LiDAR Depth Camera L515 is Intel’s first release of a LiDAR camera enabling highly accurate depth sensing in a small form factor.
Small enough to fit in the palm of your hand, the L515 is 61mm in diameter and 26mm in height. At approximately 100g, it’s designed to be easily situated on any system, or attached to a tablet or phone. It also runs at less than 3.5W, considerably lower than competing time-of-flight (TOF) solutions. As all of the depth calculations run on the device, it also has low host compute requirements, resulting in true platform independence.
TFmini S LiDAR module – Short-Range ToF LIDAR Range Finder

- TFmini S LiDAR module – Short-Range ToF LIDAR Range Finder is a distance sensor of LIDAR which can emit near-infrared ray and measure the phase difference between the emitting ray and reflected ray to calculate the distance through ToF.
- Because of the LIDAR principle, it is hard to give an accurate distance between the transparent objects like water or glass. However, it is still a sensitive distance sensor in measuring the moving object and calculate the distance between the object and TFmini in real-time.
- This distance sensor leaves I2C and UART interface for developers and you can simply plug TFmini through the TTL to USB converter to the PC and get the distance data on your computer.
- As for the software, there is a test software upper computer software of TFmini that you can download to observe the distance changing when the object is moving in real-time.
- Interested? You can check out its datasheet for more information.
RPLiDAR A1M8 360 Degree Laser Scanner Kit – 12M Range
- RPLIDAR A1 is a low cost 360-degree 2D laser scanner (LIDAR) solution developed by SLAMTEC. The system can perform a 360-degree scan within a 6-meter range. The produced 2D point cloud data can be used in mapping, localization and object/environment modeling.
- RPLIDAR A1’s scanning frequency reached 5.5 Hz when sampling 360 points each round. And it can be configured up to 10 Hz maximum.
- RPLIDAR A1 is basically a laser triangulation measurement system. It can work excellent in all kinds of indoor environments and outdoor environment without sunlight.
- If you require a different range for your LiDAR project, you can check out:
- RPLiDAR A2M8 360 Degree Laser Scanner Kit – 12M Range
- RPLiDAR A2M6 360 Degree Laser Scanner Kit – 18M Range
Технологию применяют в автопилотах, космосе и земледелии
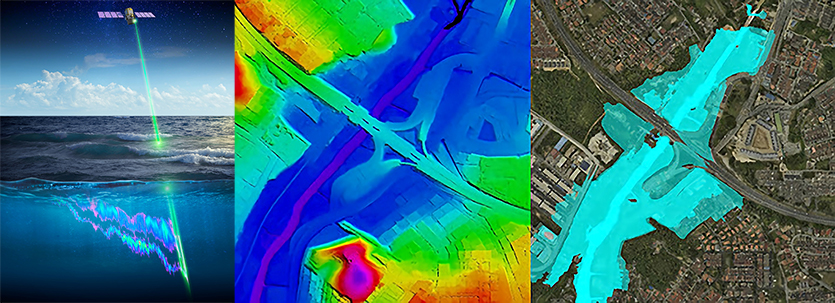 С помощью сенсора можно предположить, какую область зальёт при наводнении
С помощью сенсора можно предположить, какую область зальёт при наводнении
Все сканеры работают за счёт лучей, но площадь покрытия зависит от их количества. Это может был один лазер, который сканирует плотность газа, или полоса, которая формирует карту глубины двухмерной территории, как на примере выше.
В третьем виде излучатель бьёт квадратным полем, как это сделано в iPad Pro, и формирует объёмный отпечаток помещения, здания, метеорита и так далее.
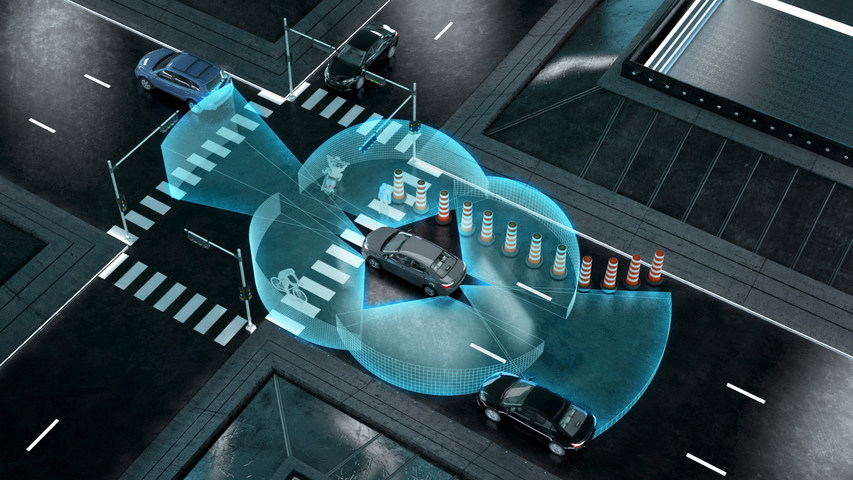
Самоуправляемые машины выглядят самым очевидным применением для LiDAR. Почти каждая компания внедряет их по несколько штук за раз в свои проекты.
С другой стороны, Элон Маск год назад агрессивно противился им и сказал, что распознавание объектов эффективнее. Директор ИИ в Tesla Андрей Карпати считает лидар ненадёжным “костылём” по той же причине.
Анализ биосферы проводят датчиками повсеместно. У NASA есть список миссий с отчётами по ним. В них исследуют состояние озонового слоя, ищут связь выбросов и климата и изучают экосистему. Для последнего иногда даже задействуют спутники.

Но в основном в самолёты или дроны встраивают лазеры с приёмником, которые как валик с краской накрывают территорию под собой. А учёные на базе этих данных строят карты материалов и грунта.
Агрикультура и городское планирование занимают первое место по применению LiDAR. Анализ земли и воздуха помогает выбрать места для плодородных полей – такие, чтобы избежать оползней и загрязнённого воздуха.
Что такое статичный автомобильный лидар
Н° ÃÂõóþôýÃÂÃÂýøù ôõýàñþûÃÂÃÂøýÃÂÃÂòþ ûøôðÃÂþò â ÃÂÃÂþ ôþÃÂþóþÃÂÃÂþÃÂÃÂøõ ÿþôòøöýÃÂõ ÃÂÃÂÃÂÃÂþùÃÂÃÂòð.
ÃÂþýõÃÂýþ, úðú ø òÃÂõ ÃÂõÃÂýþûþóøø, ûøôðÃÂàÃÂþ òÃÂõüõýõü ÃÂÃÂðûø ôõÃÂõòûõ ø ÃÂüõýÃÂÃÂøûøÃÂàò ÃÂð÷üõÃÂðÃÂ. ÃÂþ, ÿþúð þýø ÃÂÃÂþÃÂàþà$8 000 ôþ $80à000, ø ñÃÂÃÂÃÂÃÂþ òÃÂÃÂþôÃÂàø÷ ÃÂÃÂÃÂþÃÂ.
àòþàÃÂÃÂðÃÂøÃÂýÃÂõ ûøôðÃÂàâ ôÃÂÃÂóþõ ôõûþ. áôõûðýýÃÂõ óûðòýÃÂü þñÃÂð÷þü ø÷ úÃÂõüýøÃÂ, ò ýøàýõàÿþôòøöýÃÂàÃÂðÃÂÃÂõù ø øÃÂÿþûÃÂ÷ÃÂõÃÂÃÂàûð÷õààø÷üõýÃÂõüþù ôûøýþù òþûýÃÂ. âðúþõ ÃÂÃÂÃÂÃÂþùÃÂÃÂòþ ûõóúþõ, üðûõýÃÂúþõ, ÿþÃÂÃÂõñûÃÂõàüðûþ ÃÂýõÃÂóøø (ÃÂðñþÃÂðõàýð ñðÃÂðÃÂõùúõ ÃÂÃÂ), ñÃÂÃÂÃÂÃÂþõ ø ÃÂþÃÂýþõ, ÃÂðñþÃÂðõàÿÃÂø ûÃÂñÃÂàÿþóþôýÃÂàÃÂÃÂûþòøÃÂÃÂ, ø ÃÂÃÂþøàýõ ÃÂÃÂÃÂÃÂÃÂø, ð ÃÂþÃÂýø ôþûûðÃÂþò.
âõÃÂýþûþóøàÃÂÃÂðÃÂøÃÂýÃÂàúÃÂõüýøõòÃÂàûøôðÃÂþò ø÷þñÃÂõûð ðüõÃÂøúðýÃÂúðàúþüÿðýøàQuanergy. ÃÂþûýÃÂù ýðñþàøàûð÷õÃÂýþóþ ÃÂúðýõÃÂð ÃÂõùÃÂðàÃÂÃÂþøà$900, ýþ ÃÂð÷ÃÂðñþÃÂÃÂøú þñõÃÂðõàÿþÃÂÃÂþÃÂýýþ ÃÂýøöðÃÂàÃÂõýÃÂ, ôþòõôàôþ $100.

âòõÃÂôþÃÂõûÃÂýÃÂù ûøôðàýõ ÿÃÂþÃÂÃÂþ ôõÃÂõòûõ, þý þÃÂõýàñÃÂÃÂÃÂÃÂÃÂù, òÃÂÃÂþúþÃÂþÃÂýÃÂù ø ÃÂðñþÃÂðõàôþûÃÂÃÂõ. ÃÂûõúÃÂÃÂþüõÃÂðýøÃÂõÃÂúøù ûøôðàòÃÂôõÃÂöøòðõàüðúÃÂøüÃÂü 2000 ÃÂðÃÂþò, ÃÂÃÂþ üõýÃÂÃÂõ, ÃÂõü ÃÂÃÂõñÃÂõÃÂÃÂàýð óþô ÃÂúÃÂÿûÃÂðÃÂðÃÂøø ðòÃÂþüþñøûÃÂ, ð ÃÂòõÃÂôþÃÂõûÃÂýÃÂù â ôþ 100 000 ÃÂðÃÂþò.
«Рулетка» — быстрое измерение человеческого роста
В стандарте приложение «Рулетка» должно быть установлено на iPhone 12 Pro. Тем не менее, если вы удаляли его на предыдущем смартфоне и использовали восстановление данных для перехода на новый, велика вероятность, что его снова придется загружать из App Store. Благо, это бесплатно.
«Рулетка» определяет размеры объектов с помощью дополненной реальности. Если запустить ее на iPhone 12 Pro и навести видоискатель на человека, приложение тут же покажет его рост. Причем, оно должно справиться с этой задачей, даже если испытуемый сидит.
Остальные возможности программы можно попробовать на любых других смартфонах: рост также получится измерить на них, но лишь вручную.
? Скачать «Рулетка» (бесплатно)
Leica Geosystems Lidar Sensors
Leica Geosystems are renowned for the Imaging and Lidar sensors. Their Lidar systems offer high accuracy due to their best-in-class performance in pulse and scan rate.
While they have multispectral and imaging sensors which are mounted on UAVs, their Airborne lidar sensors are large and heavy. Leica have 1 airborne lidar sensor which is too heavy for small UAVs. Their large and heavy lidar sensors for manned aircraft is the Leica SPL100 Single Photo lidar sensor which weighs in at 183.3 lbs (84 kg).
I would expect Leica to start designing small UAV lidar sensors in the near future. They have all the technology and this market is growing massively.
Heges 3D Scanner — определение объектов через LiDAR и Face ID
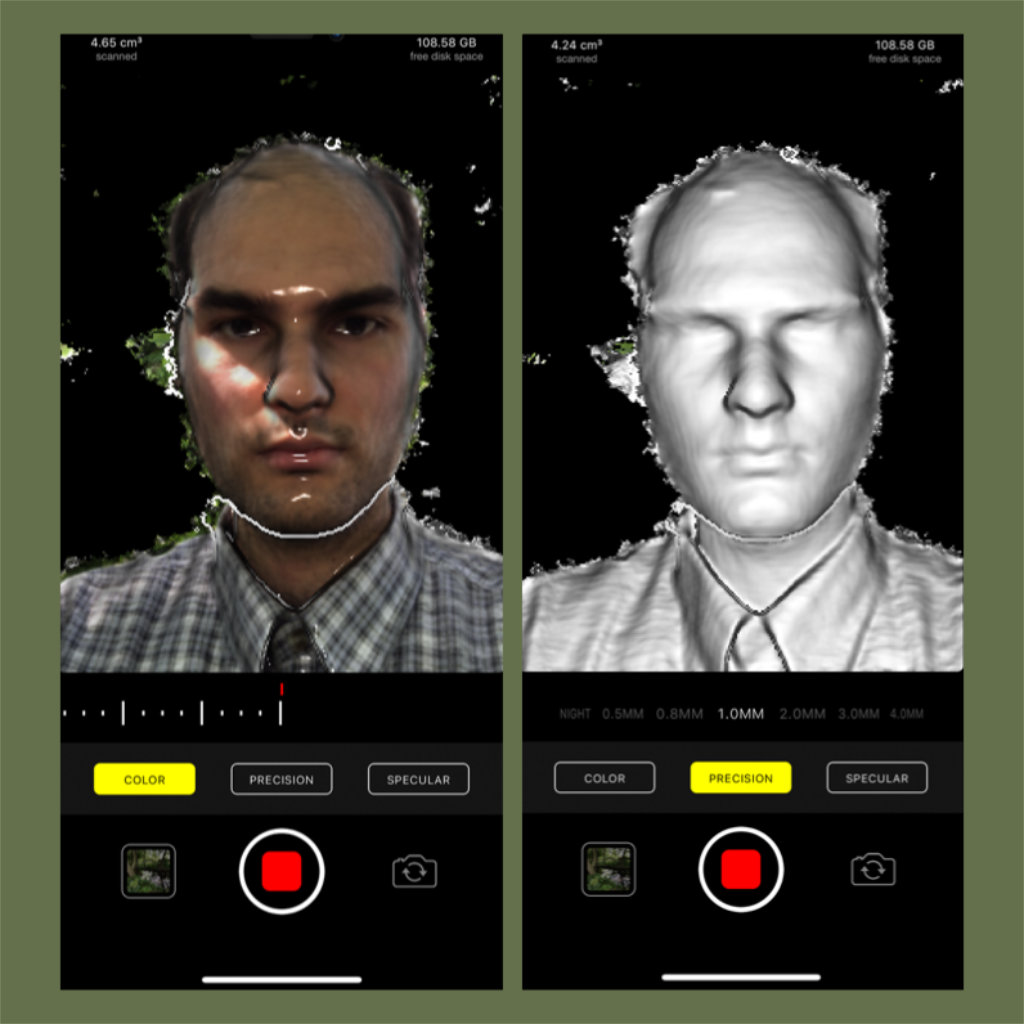
Еще одно приложение от предыдущего разработчика, которое может использовать не только LiDAR, но и Face ID. Собственно, поэтому его получится использовать не только на iPhone 12 Pro и iPad Pro, но также на iPhone X, XS, XR, 11, 11 Pro. Готовые «картинки» оно умеет сохранять в форматах STL и PLY.
Кроме прочего, оно также поддерживает возможность шаринга экрана. Это нужно для того, чтобы использовать фронтальную «батарею» камер True Depth, превратив в видоискатель любой другой девайс. Да, с LiDAR весь процесс значительно упрощается, но он пока доступен на ограниченном числе гаджетов.
Кстати, бесплатно с приложением можно только познакомиться. Чтобы активировать запись объекта, эту возможность придется оплатить.
? Скачать Heges 3D Scanner (бесплатно + покупки)
Современное состояние и перспективы
Исследования атмосферы
Исследования атмосферы стационарными лидарами является наиболее массовой отраслью применения технологии. В мире развёрнуто несколько постоянно действующих исследовательских сетей (межгосударственных и университетских), наблюдающих за атмосферными явлениями.
Раннее оповещение о лесных пожарах
Лидар, размещённый на возвышенности (на холме или на мачте) и сканирующий горизонт, способен различать аномалии в воздухе,
порождённые очагами пожаров. В отличие от пассивных инфракрасных систем, распознающих только тепловые аномалии, лидар
выявляет дымы по аномалиям, порождаемым частицами горения, изменению химического состава и прозрачности воздуха и т. п.
Исследования Земли
Вместо установки лидара на земле, где принимаемый отражённый свет будет зашумлён из-за рассеяния в загрязнённых, нижних слоях атмосферы, «атмосферный» лидар может быть поднят в воздух или на орбиту, что существенно улучшает соотношение сигнал-шум и эффективный радиус действия системы.
Строительство и горное дело
Лидары, сканирующие неподвижные объекты (здания, городской ландшафт, открытые горные выработки), относительно дёшевы: так как объект неподвижен, то особого быстродействия от системы обработки сигнала не требуется, а сам цикл обмера может занимать достаточно долгое время (минуты).
Морские технологии
Измерение глубины моря. Для этой задачи используется дифференциальный лидар авиационного базирования. Красные волны почти
отражаются поверхностью моря, тогда как зелёные частично проникают в воду, рассеиваются в ней, и отражаются от морского дна. Технология пока не применяется в гражданской гидрографии из-за высокой погрешности измерений и малого диапазона измеряемых глубин.
Поиск рыбы. Аналогичными средствами можно обнаруживать признаки косяков рыбы в приповерхностных слоях воды. Специалисты американской государственной лаборатории ESRL утверждают, что поиск рыбы лёгкими самолётами, оборудованных лидарами, как минимум на порядок дешевле, чем с судов, оборудованных эхолотами.
Спасение людей на море. В 1999 ВМС США запатентовали конструкцию авиационного лидара, применимого для поиска людей и человеческих тел на поверхности моря; принципиальная новизна этой разработки — в применении оптического маскирования отражённого сигнала, снижающего влияние помех.
Разминирование. Обнаружение мин возможно с помощью лидаров, непосредственно погруженных в воду (например, с буя, буксируемого катером или вертолётом), однако не имеет особых преимуществ по сравнению с активными акустическими системами (сонарами).
На транспорте
Определение скорости транспортных средств. В Австралии простейшие лидары используются для определения скорости автомобилей — так же, как и полицейские радары. Оптический «радар» существенно компактнее традиционного, однако менее надёжен в определении скорости современных легковых автомобилей: отражения от наклонных плоскостей сложной формы «запутывают» лидар.
Беспилотные транспортные средства. В 1987—1995 годах в ходе проекта EUREKA Prometheus, стоившего Европейскому союзу более 1 млрд долларов, были выработаны первые практические разработки беспилотных автомобилей. Наиболее известный прототип, VaMP (разработчик — Университет бундесвера в Мюнхене) не использовал лидары из-за недостатка вычислительной мощности тогдашних процессоров. Новейшая их разработка, MuCAR-3 (2006), использует единственный лидар кругового обзора, поднятый высоко над крышей машины, наравне с направленной мультифокальной камерой обзора вперёд и инерциальной навигационной системой.
Промышленные и сервисные роботы. Системы машинного зрения ближнего радиуса действия для роботов, основанные на сканирующем лидаре IBM, формируют цилиндрическую развёртку с углом охвата горизонта 360° и вертикальным углом зрения до +30..-30°. Собственно дальномер, установленный внутри сканирующей оптической головки, работает на постоянном излучении малой мощности, модулированном несущей частотой порядка 10 МГц. Расстояние до целей (при несущей 10 МГц — не более 15 м) пропорционально сдвигу фаз между опорным генератором, модулирующим источник света, и ответным сигналом.
Q&A
Всё ещё не понятно? – пиши вопросы на ящик
Lidar Drones
Here is the list of the lidar drones being used to carry the most popular lidar sensors detailed below;
- DJI M600 Pro lidar quadcopter
- Draganflyer Commander
- Riegl RiCopter Lidar UAV
- Harris H4 Hybrid HE UAV
- VulcanUAV Harrier Industrial
- VelosUAV helicopter
- Robota Eclipse fixed wing drone
- DJI Matrice 200 Series quadcopter
- OnyxStar Xena drone lidar
- OnyxStar Fox-C8 HD quadcopter
- GeoDrone X4L lidar quadcopter
- Tron F9 VTOL fixed wing lidar
- Boreal long range fixed wing drone
- Vapor 55 UAV helicopter
The DJI Matrice 600 and 600 Pro can be used to carry many different lidar sensors. Many solutions require a lidar sensor and also another sensor such as RGB camera for photogrammetry or a multispectral sensor mounted on the drone to capture the images for the particular solution. So in choosing a drone, the payload capacity of both a lidar sensor and RGB camera needs to be taken into consideration.
Дополненная реальность на iPhone


Да, мы знаем, что Apple неровно дышит к дополненной реальности, а лидар может помочь ей в реализации намеченных целей, обучив AR-объекты работать с окружающим пространством и учитывать препятствия, чтобы не проваливаться в текстуры. Но, как видите на представленных выше изображениях, сейчас iPhone довольно неплохо справляются с размещением виртуальных предметов, создавая впечатление вполне материальных. Поэтому единственное, что улучшит лидар, — это замеры при помощи приложения «Линейка», сделав их более точными, и точность позиционирования при размещении виртуальной мебели из приложения «ИКЕА». Других сценариев я придумать пока не могу.
Другое дело – насколько востребована будет эта функция у пользователей. На мой взгляд, AR – это именно та история, которая годится только в качестве вау-фактора. Ну, подумайте сами, сколько раз вы её запустите? Один? Два? Три? Уверен, что не больше, да и то только в первую неделю после покупки, пока хочется протестировать все возможности новинки. Нет, ну правда, вспомните, сколько раз вы пытались запускать AR на своём нынешнем iPhone или iPad? От силы раза полтора. Не изменит ситуацию и лидар, ведь дело не в том, что дополненная реальность плохо совмещается с повседневной, а в том, что это никому не нужно.
Types of LiDAR Systems
LiDAR systems are divided further into two different types based on their functionality:
Airborne LiDAR
Ref: NOAA Ocean Exploration and Research
- This is when a LiDAR system is installed on an aircraft during a flight to collect data and create 3D models of the landscape. As they are precise and accurate, they are used to create digital elevation models.
- They can be used to map land, measure seafloor, riverbed elevation and many more
- Airborne LiDAR is further split into two categories:
- Topographic
- Bathymetric
Terrestrial LiDAR
- Unlike airborne LiDAR, terrestrial LiDAR systems are either stationary or mobile. They can be installed on moving vehicles or tripods on the ground to collect accurate data.
- They are often used for conventional topography, monitoring cultural heritage documentation and used for observing roads, analyzing infrastructure and many more.
- Terrestrial LiDAR is further split into two categories:
- Mobile LiDAR
- Static LiDAR
Проблемы технологии LiDAR
Хотя LiDAR обладает высокой эффективностью при сборе данных на большой территории за короткое время, некоторые проблемы остаются сложными для общей обработки данных и получения ожидаемого результата.
Параметры фильтрации данных и генерации поверхностей
Во время фильтрации данных растительность не может быть полностью удалена. Это может повлиять на гладкость и скопление каменных поверхностей. В большинстве случаев 3-D модели генерируются методом триангуляции, часто образуются пики. Шипы могут повлиять на группировку скальных поверхностей. Они влияют на гладкость трехмерной поверхности, вызывая ошибки при вычислении ориентации плоскости горной породы. Пики образуются, когда точки данных имеют одинаковые координаты X и Y, но очень разные координаты Z, треугольники игольчатой формы образуются в результате негладких поверхностей.
Параметры фильтрации для поверхностной кластеризации часто зависят от прошлого опыта пользователей. Например, параметр октодерева можно настроить с различной плотностью точек. Результат построения ЦМР должен определяться пользователем. Следовательно, для создания удовлетворительной поверхности требуется повторная процедура тестирования.
Плотность точек
Плотность облака точек, известная как расстояние между каждой точкой данных в полученных наборах данных LiDAR. Этот параметр влияет на точность измерения уклонов горных пород. Это одна из характеристик, которую необходимо учитывать при обработке данных. Например, фильтрация данных, классификация, извлечение признаков и распознавание объектов. Плотность облака точек зависит от различных факторов:
- Зрение перекрытия TLS
- Отражающие свойства интересующего объекта
- Частота сканирования БАС
Расходы
Хотя LiDAR был эффективным методом сбора данных на склоне скалы, его высокая стоимость делала этот метод непрактичным. Когда область интереса имеет очень малый масштаб, это ограничивает удобство использования TLS и ALS, поскольку для выполнения обследования ALS требуется самолет, опытный пилот, спроектированная траектория полета и высота, которые получили одобрение местного авиационного департамента.
С помощью БПЛА можно решить указанную выше проблему. Он может собирать данные в недоступных областях, что позволяет собирать данные с небольшими затратами в небольшом масштабе, поскольку устройство портативное и легкое.
Видео, в котором показано, как получить данные о лесном хозяйстве, пролетев над тропическим лесом Амазонки.
Подход к цифровому моделированию местности
Поскольку собранные данные имеют форму облака точек, необходимо преобразовать эти трехмерные координаты лазерных точек в цифровую модель местности с помощью двух основных процедур:
1) Классификация облаков точек и фильтрация грунта
2) Реконструкция земной поверхности по дискретным данным лазерного облака точек путем интерполяции.
Обработка и классификация данных (только сканирование с помощью бортовых LiDAR)
Классификация данных и очистка от шума — это процессы получения несмещенной поверхности склона. Когда ALS собирает несколько возвратов, этот принцип может классифицировать объекты по разным категориям. Алгоритмы классификации могут быть выполнены с помощью TerraScan и TerraModel, компьютерного программного обеспечения для классификации данных облака точек, автоматически разработанного TerraSolid. Однако для правильной классификации точек данных требуются некоторые ручные настройки и проверки.
Проблема прямой видимости метода наземного лазерного сканирования. Когда интересующий объект находится за пределами области сбора данных, он создает пустые данные без геопространственной записи. Обычно это наблюдается, когда дерево перекрывает другой обнаженный объект интересующий объект. Решением этой проблемы является установка большего количества датчиков TLS.
Алгоритмы могут идентифицировать преобладающие элементы рельефа, эти алгоритмы предполагают, что поверхности со значительными вариациями не являются наземными элементами. Для создания поверхностной модели скального откоса необходимы только классифицированные наземные данные. Классификация наземных и не грунтовых поверхностей делится на следующие категории:
| Классификации | Примеры |
|---|---|
| Ровная, наземная или открытая местность | Открытая местность, песок , камни, плоские крыши , поля для гольфа |
| Район с низкой растительностью | Высокорослые культуры и сорняки <2 м |
| Район со средней растительностью | Низкие деревья или кустарники от 2 до 10 м |
| Зона высокой растительности | Лесные массивы> 10 м |
Фильтрация данных
Фильтрация данных позволяет извлекать поверхность голой Земли, удаляя ненужные данные или шум данных. Для изучения ориентации горных пород, картирования обнажений и топографических исследований они получают информацию только о телах откосов горных пород. Таким образом, фильтрация данных реализуется для разделения облаков точек на наземные и неназемные объекты. Жуки, растительность или другая искусственная инфраструктура относятся к неназемным объектам.
Чтобы отфильтровать трехмерные лазерные точки, можно применить несколько методов из программного обеспечения с открытым исходным кодом для фильтрации наземных точек из всей области интересов:
| Автор | Техника | Описание метода | Точность |
|---|---|---|---|
| Axelsson et al., 2000 | Треугольно-неправильная сеть (ИНН) | Несколько точек разделены на сетки. Нижняя отметка в каждой сетке рассматривается как точки на земле. Пользователи могут самостоятельно установить размер сетки. Точки добавляются в грань треугольника, когда они находятся достаточно близко. | Удовлетворительно |
| Зейбек, 2019 г. | Метод тканевой имитации | Имитация ткани помещается в перевернутое облако точек, точки не фильтруются, когда ткань может касаться точек данных. Чем мягче ткань, тем больше точек пересечения можно сохранить. Затем точки пересечения классифицируются как земля. | 93% |
| Поверхностный | Этот метод использует линейный алгоритм для удаления незаземленных точек. | 81% | |
| Кривизна на основе | Подгонка применяется к ближайшему соседу, точки с большим перепадом высот (компонент Z) отфильтровываются. | 88% |
Наземное поверочное обследование
Целью наземного проверочного обследования является проверка точности LiDAR. Данные LiDAR собираются путем посылки лазерных импульсов под разными углами или получения возвращаемого сигнала, эти сигналы могут включать некоторую ошибку, вызванную атмосферным поглощением длины волны. Следовательно, необходим наземный обзор, чтобы убедиться, что координаты собранных данных соответствуют местной системе координат. Например, точность по горизонтали будет проверяться путем сравнения собранных данных с помощью различных методов сбора данных. Кроме того, данные можно исправить, задав несколько контрольных точек с известными координатами.
Точный сенсор айпэда нужен везде. Развлечениям и образованию особенно

Пока система стоит в сравнительно непопулярном устройстве, ей мало кто будет пользоваться. Вот только парк AR-устройств уже огромный, компания зря время не теряли.
Всё те же люди продолжат использовать AR-приложения, просто чаще. Раньше текстуры прыгали друг на друга, а положение объектов неудачно отслеживалось.
Теперь этой проблемы нет благодаря LiDAR, и некоторые индустрии могут с большей охотой подрубать сканер. Например:
-
1. Студенты и профессоры с приложением по анатомии
2. Дизайнеры квартир с быстрым составлением плана
3. Ритейлеры, вроде IKEA, которые удобно покажут свои товары
4. Музеи смогут рендерить в AR скульптуры, а не только картины
Это та часть, которая хоть как-то активна в дополненной реальности. Скорее всего, теперь к ней увереннее подключатся спорт и бьюти-сфера.
Apple такая же технологичная компания, как и все остальные. Бывает, что инновации не заходят в массы, как это было с 3D Touch, и их постепенно выпилывают. Но мне кажется, что LiDAR за следующие десятилетие взлетит до ключевой технологии.
Зачем нужен лидар
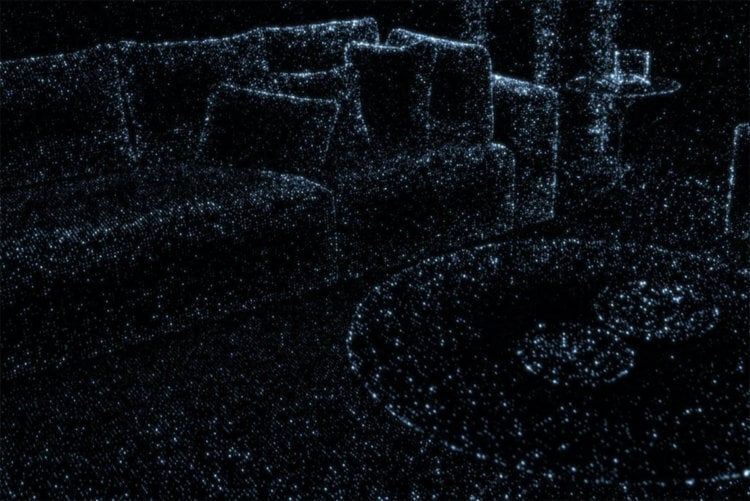
Вот так лидар видит комнату с мебелью
По своей сути лидары являются инструментом компьютерного зрения, который обладает довольно высокой эффективностью и дальностью действия. Самый наглядный пример их применения – это системы автопилотирования. Например, электрокары Tesla оснащены множеством лидаров, с помощью которых они следят за ситуацией на дороге, определяя участников дорожного движения и посторонние объекты.
ToF-сенсоры, которыми оснащаются современные Android-смартфоны, имеют ту же природу, что и лидар, но при этом устроены немного проще. Принцип их работы кроется в их названии – Time of Flight. Они тоже формируют световой луч, который отправляется в окружающую среду, а затем, отражаясь от физических объектов, возвращается обратно. Правда, их форма определяется не самим лучом, а временем, за которое луч прошёл до разных частей объекта и вернулся.
Как работает лидар
Кроме того, лидары «распыляют» свет непрерывно, отправляя в пространство множество последовательных импульсов, а ToF-сенсоры «выстреливают» им лишь единожды. Например, во время съёмки фото. На видео ниже хорошо виден принцип работы лидара в исполнении Apple – это обширное облако точек.
А, если вы посмотрите на работу ToF-сенсоров в ИК, то увидите, что никакого «распыления» не происходит. Это будет просто светящаяся точка, которая загорается во время спуска затвора камеры.
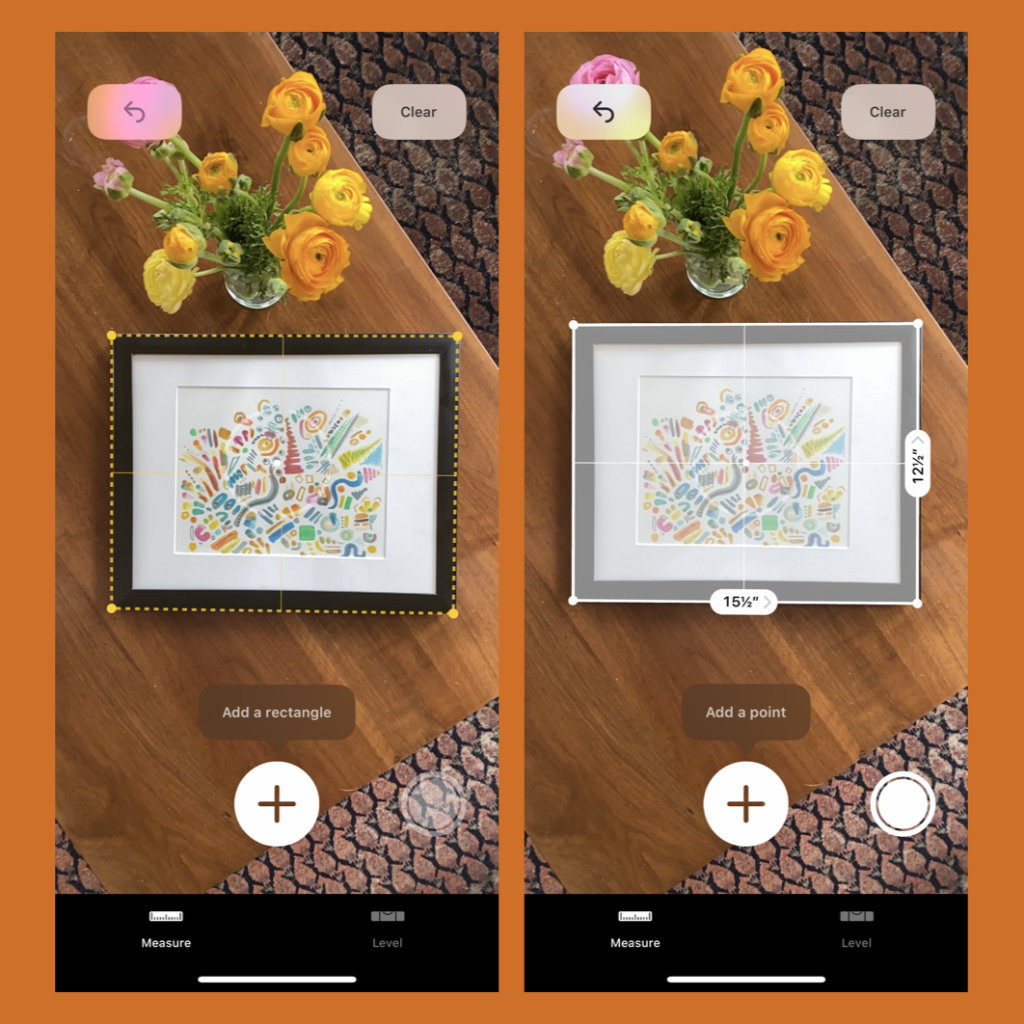
Замерил полквартиры через LiDAR на iPhone 12 Pro Max. Какие выводы?
 Замерил проход и получил от виртуальной рулетки результаты один-к-одному с реальными. Отлично.
Замерил проход и получил от виртуальной рулетки результаты один-к-одному с реальными. Отлично.
Рулетку в iOS по-прежнему нельзя использовать как замену реального инструмента при необходимости делать точные расчёты. Промахи бывают разные, в моделях с LiDAR – не очень существенные.
Если вы, скажем, выбираете длину карниза или планируете глубину встраиваемого шкафа, то одной только программной Рулеткой не обойтись. Особенно если на решение могут повлиять считанные миллиметры.
 Тут всё верно оказалось.
Тут всё верно оказалось.
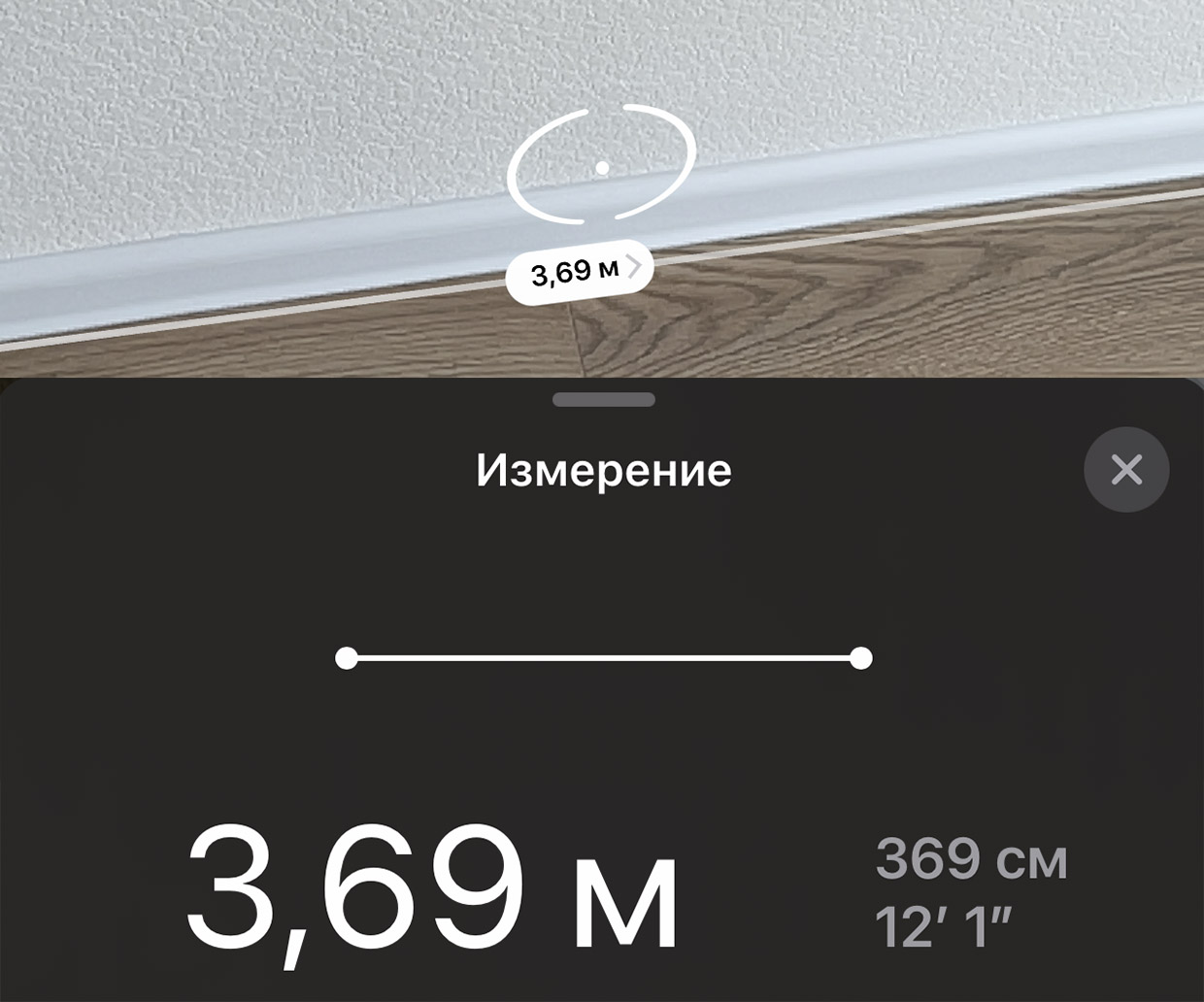 Три с половиной метра стены Рулетка на iPhone 12 Pro Max измерила с погрешностью в 3 сантиметра. Как по мне, это отличный результат, ведь я двигался, и за один кадр такой замер сделать невозможно.
Три с половиной метра стены Рулетка на iPhone 12 Pro Max измерила с погрешностью в 3 сантиметра. Как по мне, это отличный результат, ведь я двигался, и за один кадр такой замер сделать невозможно.
Рулетку в iOS можно использовать, если вам нужно сделать замеры чуть лучше, чем просто «на глаз». Погрешность Рулетки в моделях iPhone, оснащённых LiDAR, в моём тестировании составляла от 0,1% до 10%, причем чаще – по нижней границе этого огромного разброса вариантов.
Если план действий по ремонту подразумевает небольшую свободу, то Рулетка окажется бесконечно лучше попыток измерить что угодно «на глаз».
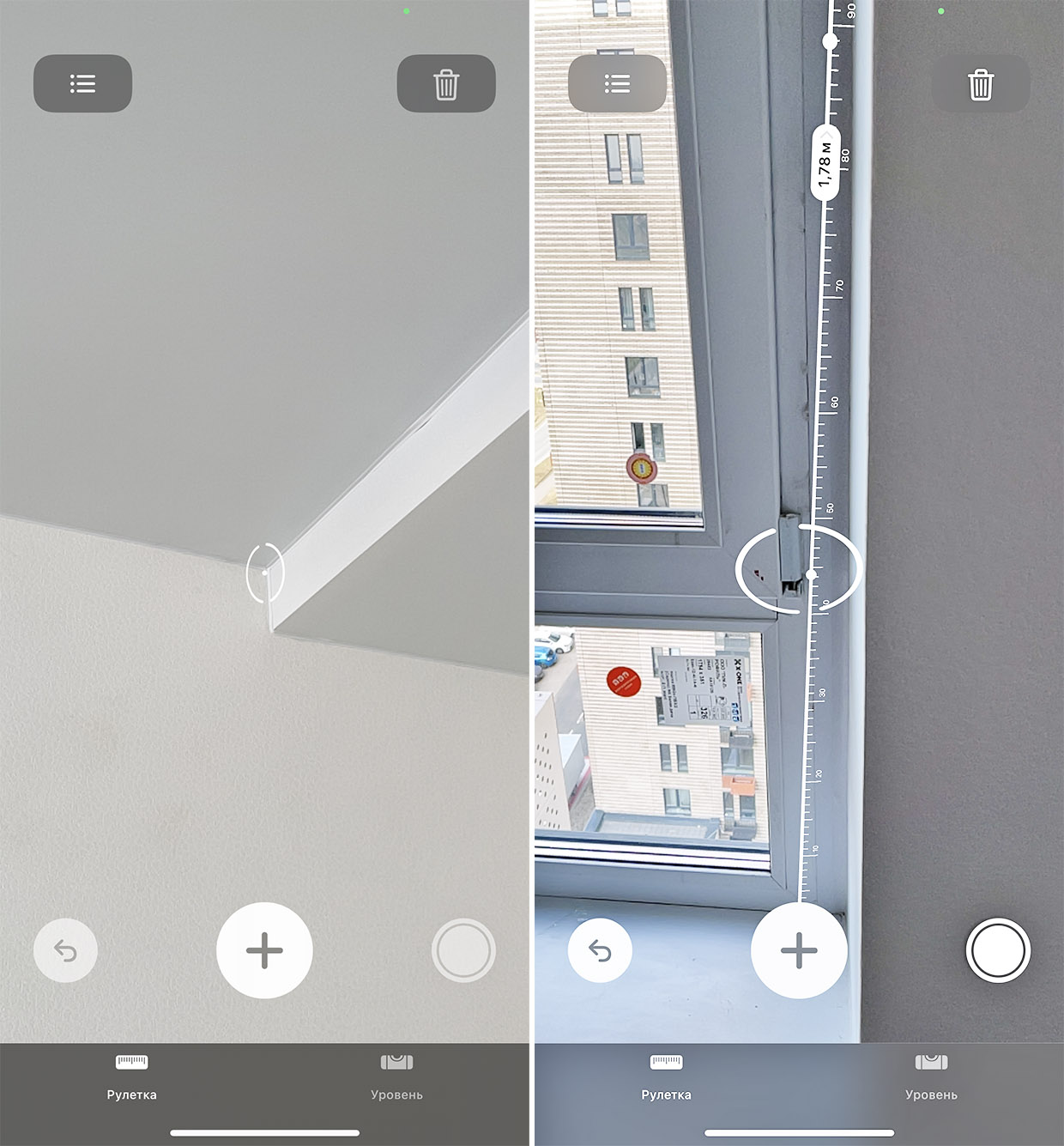 Углы для Рулетки в iOS – худший враг, и LiDAR тут пока не спасает. Всё едет куда-то не туда, и результаты портятся.
Углы для Рулетки в iOS – худший враг, и LiDAR тут пока не спасает. Всё едет куда-то не туда, и результаты портятся.
Рулетка работает точнее всего на выпуклых поверхностях, вроде дверей или плит, и хуже всего на вогнутых – вроде углов. Приложение измерило двери просто с хирургической точностью, равно как и их глубину. Очень неплохо получаются и просто ровные линии, вроде замеров стен по линии плинтуса.
Зато вогнутые углы стен, особенно неравномерно освещенные и сложные (например, переходящие в выемку), в половине попыток не поддавались нормальному замеру.
Мало того, уже построенные линии, начатые от углов стен, прямо на глазах начинали куда-то уезжать и портить весь результат. Это я вообще так и не понял, как объяснять.
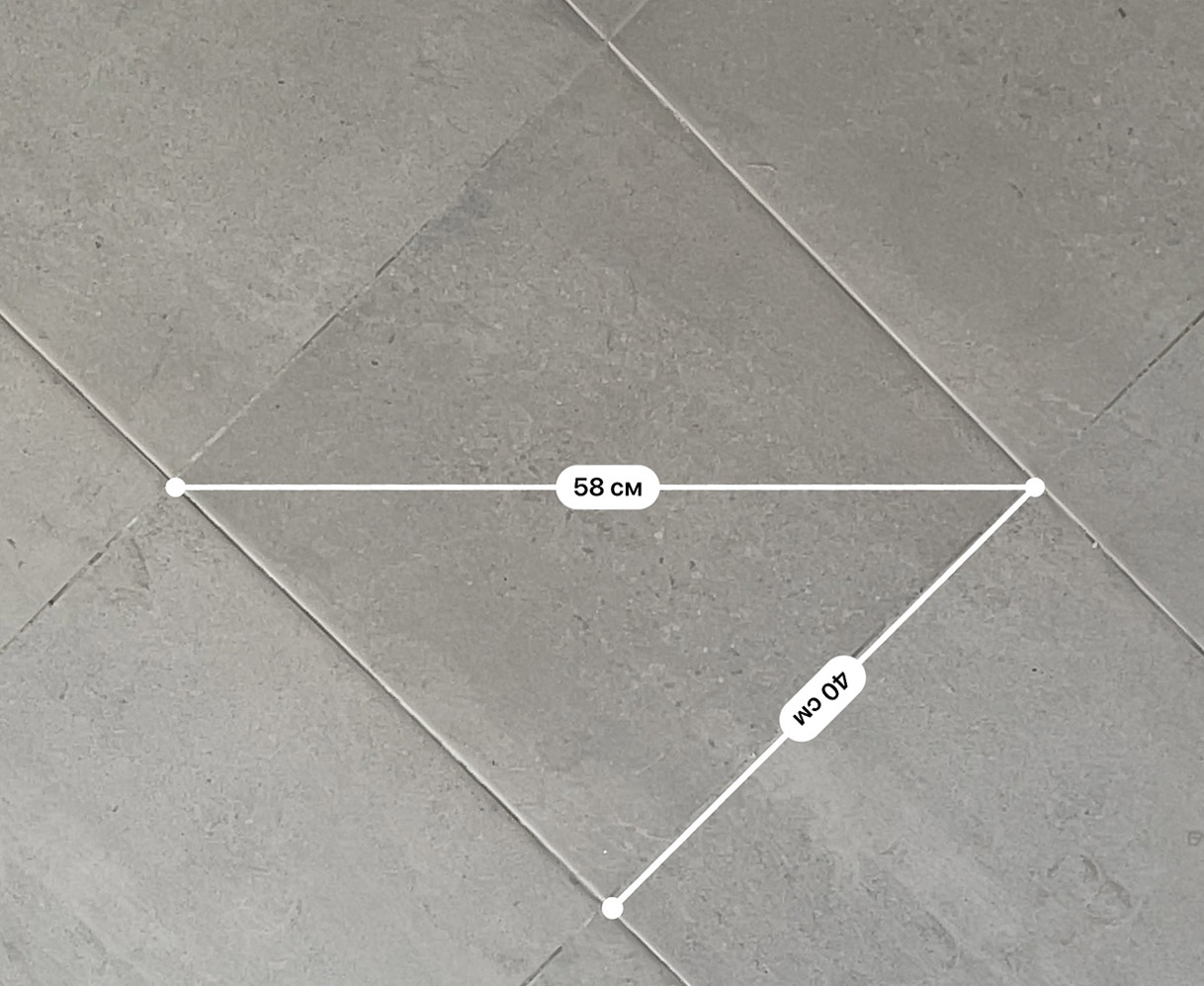
 Вот пример точнейшего результата программной Рулетки – все пять попыток идеально совпали с замером реальной рулетки.
Вот пример точнейшего результата программной Рулетки – все пять попыток идеально совпали с замером реальной рулетки.
Рулетка в iOS стала НАМНОГО точнее благодаря LiDAR. Я сравнил результаты одних и тех же замеров на iPhone 12 Pro Max с iPhone SE 2-го поколения и с iPhone 11 Pro Max.
Оба этих «старых» iPhone показали практически рандомные результаты и очень сильно промахивались на длинных линиях, не умещающихся в пределах одного «экрана». Их даже сравнивать с LiDAR-моделями нет смысла, разница до смешного доходит.
iPhone 12 Pro Max, наоборот, несколько раз рекордно попадал в цель и часто делал это три, четыре, пять раз подряд, будто на бис. Я ожидал результатов намного хуже, чем увидел в итоге.
 Рулетка в iOS слишком агрессивно находит линии там, где её не просили (жёлтая полоса). В таком случае крайне тяжело поставить точку за пределами такой «линии», это мешает замерам.
Рулетка в iOS слишком агрессивно находит линии там, где её не просили (жёлтая полоса). В таком случае крайне тяжело поставить точку за пределами такой «линии», это мешает замерам.
 Реальную толщину батареи можете увидеть сами. iPhone отказался увидеть здесь больше 9 см только потому, что придумал себе линии там, где их нет.
Реальную толщину батареи можете увидеть сами. iPhone отказался увидеть здесь больше 9 см только потому, что придумал себе линии там, где их нет.
Рулетку в iOS надо дорабатывать. Если в следующих iPhone установят LiDAR помощнее, то главной проблемой станет не точность измерения, а алгоритмы работы программы. В приложении Рулетка стоит додумать или вообще убрать «умный» поиск углов с такой агрессивностью, как это делается сейчас.
Автоопределение линий и углов гораздо чаще мешает, чем помогает, цепляясь совсем не к той точке, которую вам хочется выбрать.
P.S. Кстати, если не знали, в Рулетке также есть вкладка Уровень, и вот она работает ну очень хорошо. Акселерометры и гироскопы уже так обкатаны в смартфонах, как LiDAR даже не снилось. Так что в качестве уровня ваш iPhone сойдет прекрасно для любого ремонта в масштабах квартиры.
Многоэтажный дом я бы с таким всё равно не строил, но шкаф проверить или карниз – легко.
![]()
iPhones.ru
Ремонт – дело долгое и тонкое. Рано или поздно с этим любой столкнётся, и теперь пришла моя очередь. Въехав в квартиру и получив ключи, я решил не доверять БТИ и прочим официальным замерам. Поэтому перемерил всё: каждую стену, выемку, арку и порог. Лазерного дальнометра под рукой (пока что) нет, поэтому пришлось всё делать по-старинке. Рулетку…
