Hpet
Camunda Extensions
| Attributes |
, , , |
|---|---|
| Extension Elements | , |
| Constraints | – |
Timer Start Event
A timer start event is used to create process instance at a given time. It can be used both for processes which should start only once and for processes that should start in specific time intervals.
Note: A subprocess cannot have a timer start event.
Note: A timer start event is scheduled as soon as process is deployed. There is no need to call , although calling start process methods is not restricted and will cause one more start of the process at the time of the invocation.
The XML representation of a timer start event is the normal start event declaration, with a timer definition sub-element. The following example process will start 4 times, in 5 minute intervals, starting on 11th of March 2016, at 12:13 (24 hour clock system):
and this process will start once, on a selected date:
Timer Intermediate Catching Event
A timer intermediate event acts as a stopwatch. When an execution arrives in catching event activity, a timer is started. When the timer fires (e.g., after a specified interval), the sequence flow going out of the timer intermediate event is followed.
A timer intermediate event is defined as an intermediate catching event. The specific type sub-element in this case is a timerEventDefinition element.
Timer Boundary Event
A timer boundary event acts as a stopwatch and as an alarm clock. When an execution arrives in the activity to which the boundary event is attached, a timer is started. When the timer fires (e.g., after a specified interval), the activity is interrupted and the sequence flow going out of the timer boundary event are followed.
There is the difference between an interrupting and a non interrupting timer event. The interrupting event is the default. The non-interrupting event leads to the original activity not being interrupted, the activity stays there. Instead, an additional execution is created and sent over the outgoing transition of the event. In the XML representation, the cancelActivity attribute is set to false:
ACPI HPET Table что это в биосе? : 1 комментарий
Все правильно, железный таймер на материнке точнее/не отнимает ресурсов процессора в отличие от программного таймера в винде. Поэтому в биосе надо включить, а в винде — выключить.
Популярные статьи
- Почему из продажи исчезают нетбуки? Куда они пропали?(5,00 из 5)
- Как устроен ПК. Устройство компьютера кратко(5,00 из 5)
- Как установить Autotune 8.1? Ошибка iLok(5,00 из 5)
- Кабели Ethernet, типы LAN кабелей, CAT5, CAT6(5,00 из 5)
- Как увеличить FPS в играх, отключив HPET?(4,90 из 5)
- Износ компьютера. Причины износа компьютера(4,67 из 5)
- Что лучше: Windows или Linux?(4,67 из 5)
- Как установить MinGW 7.3.0 32bit для QT Creator 5.12.0?(4,60 из 5)
Категории
- Видеоуроки (2)
- Аудио (1)
Компьютеры и технологии (16)
- Базы данных (2) Полезное (6)
Программирование (7)
- QT Creator (2) Xcode и Swift (5)
Сети и Интернет (6)
- Безопасность (3) Основы сетей (1)
Софт (1)
Свежие комментарии
Спасибо, довольно полезная статья
Great content! Super high-quality! Keep it up!
материнские платы Ас(н)ус не имеют этой настройки, отключай средствами виндоус
Помогите ребята не могу найти где в БИОСе HPET мат…
Функции аппаратного таймера
Задачей таймера является подсчет количества системных событий, связанных, например, с доступом к жесткому диску. В момент, когда предварительно установленное значение будет достигнуто, создается прерывание. Процессор приостанавливает текущую программу и реализует связанный с новой командой код.
В частности, задача HPET состоит в синхронизации мультимедийных потоков, обеспечении плавного воспроизведения аудио и видео в операционной системе и разгрузке таймеров процессора.
Симптомом неправильной работы HPET (или полного его бездействия) являются, например, регулярные секундные зависания Windows. Компьютер со временем начинает медленно работать. В такой ситуации следует задуматься над изменением параметров указанной функции.
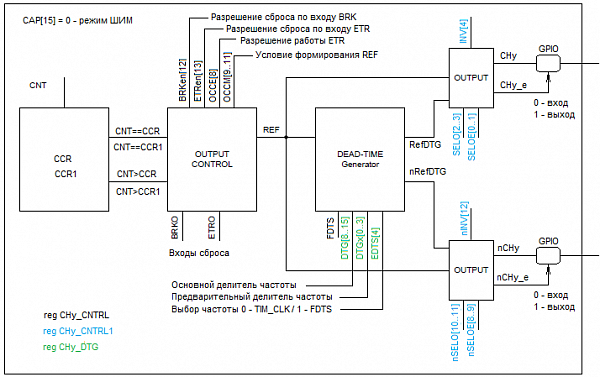
Режим ШИМ
Каждый канал таймера может работать в режиме ШИМ (широтно-импульстной модуляции), то есть генерировать импульсы заданной длины при заданном периоде. Для этого также используются регистры CCR и CCR1, которые разбивают диапазон значений CNT от 0 до ARR на необходимые интервалы. При совпадении значения CNT с одним из регистров CCR и CCR1 меняется уровень выходного сигнала Ref. Как именно изменяется сигнал Ref при совпадении регистров, настраивается в CHy_CNTRL полем OCCM.
Регистр CCR1 используется не всегда — он подключается опционально. Для использования CCR1 его необходимо включить в регистре CHy_CNTRL2 битом CCR1_EN.
Увеличить фото
Рисунок 6 — Структурная схема блока формирования ШИМ
Сигнал Ref — это внутренний сигнал, он может непосредственно подаваться на выводы канала таймера — прямой и инверсный — либо пропускаться сначала через блок DTG, а затем подаваться на выводы. При стандартных настройках на инверсный вывод автоматически подается сигнал, инвертированный относительно прямого вывода.
За подачу сигналов на прямой и инверсный выводы отвечает регистр CHy_CNTRL1, здесь для каждого из выводов своя настройка. Поле SELO определяет, какой сигнал подается на выход.
Таблица 2
| SELO | выход GPIO |
|---|---|
| 00 | «0» |
| 01 | «1» |
| 10 | Ref |
| 11 | RefDTG |
RefDTG — это сигнал Ref, прошедший через блок DTG. Помимо сигналов ШИМ может выводиться постоянный уровень «0» или «1».
Бит INV позволяет инвертировать выходной сигнал.
В блоке управления портами GPIO есть регистр OE (Output Enable), где каждый бит регистра задает режим работы порта — на вход или на выход (подробнее в статье Схемотехника портов GPIO). При настройке вывода в функцию Port (Func = 0) регистр OE задается программно. Если же функция назначает вывод для использования какому-то блоку периферии, например, UART, то значением OE управляет сам периферийный блок. В таком случае блок UART сам переключит вывод UART_TX в режим OUT, а UART_RX оставит с выключенным выходным драйвером.
При назначении вывода микроконтроллера на каналы таймера, состояние ОЕ данного вывода необходимо задать в регистре SELOE. То есть у каждого канала есть внутренний сигнал разрешения CHy_oe (nCHy_oe). Этот сигнал уходит в блок GPIO и задает, будет ли вывод канала являться входом или выходом. Если на CHy_oe подана «1», то канал работает как выход и выводит сигнал, определенный полем SELO. Если CHy_oe = 0, то вывод является входом. В случае работы в режиме захвата с этого вывода захватывается сигнал. В терминах спецификации это обозначено как — «канал на выход не работает».
Значение сигнала разрешения задается в поле SELOE. Кроме ручного выставления «0» и «1», доступен вариант, когда для сигнала разрешения используется сигнал Ref или RefDTG. В этом случае текущий уровень выбранного сигнала определяет, работает ли канал на выход или находится в Z состоянии.
Таблица 3
| SELOE | Ref / RefDTG | выход GPIO |
|---|---|---|
| 00 | — | Z |
| 01 | — | SELO |
| 10 | Ref: 0 / 1 | Z / SELO |
| 11 | RefDTG: 0 / 1 | Z / SELO |
Для инверсного вывода доступны такие же поля с префиксом n — nSELO, nINV, nSELOE.
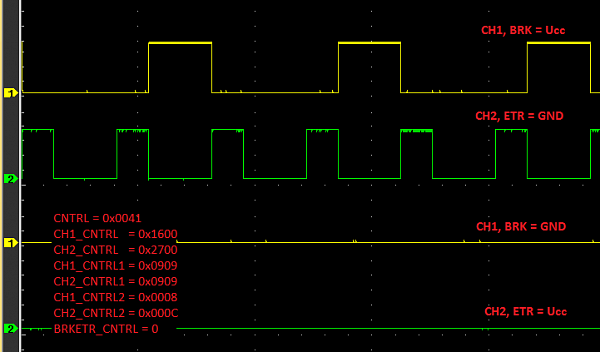
Назначение входов ETR и BRK было описано в начале статьи — они служат для аварийной остановки ШИМ. Рисунок 7 показывает активные уровни ETR и BRK, при которых сбрасывается сигнал ШИМ. Необходимо отметить, что по умолчанию эти уровни инверсны друг относительно друга. Инверсию можно настроить в регистре BRKETR_CNTRL. Работу вывода ETR необходимо разрешить битом CHx_CNTRL.OCCE=1, для BRK дополнительных настроек не требуется.
Увеличить фото
Рисунок 7 — Уровни сигналов ETR и BRK
поддержка QPC в версиях Windows
QPC был представлен в Windows 2000 и Windows XP и развивается для использования преимуществ улучшений в аппаратной платформе и процессорах. здесь описаны характеристики QPC в разных версиях Windows для поддержки программного обеспечения, работающего на этих Windows версиях.
Windows XP и Windows 2000
QPC доступен на Windows XP и Windows 2000 и хорошо работает в большинстве систем. Однако некоторые аппаратные системы BIOS не сообщают о характеристиках аппаратного процессора правильно (неразновидности TSC), а некоторые многоядерные или многопроцессорные системы используют процессоры с Тскс, которые не удалось синхронизировать между ядрами. системы с уязвимым встроенным по, на которых работают эти версии Windows могут не обеспечивать одинаковое QPC чтение на разных ядрах, если в качестве основы для QPC использовался таймер TSC.
Windows Vista и Windows Server 2008
на всех компьютерах, поставляемых с Windows Vista и Windows Server 2008, использовался счетчик платформы (таймер событий высокой точности (хпет)) или таймер управления питанием ACPI (таймер PM) в качестве базиса для QPC. Такие таймеры платформы имеют более высокую задержку доступа, чем таймер TSC, и являются общими для нескольких процессоров. Это ограничивает масштабируемость QPC , если она вызывается параллельно из нескольких процессоров.
Windows 7 и Windows Server 2008 R2
большинство компьютеров Windows 7 и Windows Server 2008 R2 имеют процессоры с постоянной ставкой тскс и используют эти счетчики в качестве базиса для QPC. Тскс — это аппаратные счетчики высокого разрешения для каждого процессора, доступ к которым можно получить с очень низкой задержкой и нагрузкой (в порядке 10 или 100 циклов машин, в зависимости от типа процессора). Windows 7 и Windows Server 2008 R2 используют тскс в качестве основания QPC в однопроцессорных системах, где операционная система (или низкоуровневая оболочка) может жестко синхронизировать отдельные тскс во всех процессорах во время инициализации системы. В таких системах стоимость чтения счетчика производительности значительно ниже по сравнению с системами, использующими счетчик платформы. Кроме того, не существует дополнительных затрат на параллельные вызовы и запросы пользовательского режима, которые позволяют избежать системных вызовов, что еще больше сокращает издержки. в системах, где таймер TSC не подходит для тимекипинг, Windows автоматически выбирает счетчик платформы (таймер хпет или ACPI PM timer) в качестве базиса для QPC.
Windows 8, Windows 8.1, Windows Server 2012 и Windows Server 2012 R2
Windows 8, Windows 8.1, Windows Server 2012 и Windows Server 2012 R2 используют тскс в качестве базиса для счетчика производительности. Алгоритм синхронизации TSC был значительно улучшен для лучшего размещения больших систем с большим количеством процессоров. Кроме того, добавлена поддержка нового точного API времени суток, что позволяет получать точные метки времени для часов стены с операционной системы. Дополнительные сведения см. в разделе жетсистемтимепреЦисеасфилетиме. на Windows RT компьютерных платформах счетчик производительности основывается на счетчике собственной платформы или системного счетчика, предоставляемого универсальным таймером Windows RT PC, если платформа настолько установлена.
Что делать, чтобы исправить CPU over voltage error?
При появлении данного сообщения первым делом для его устранения нужно сбросить настройки BIOS на заводские. Сделать это можно как через сам BIOS, так и извлечением батарейки на некоторое время.
Если это не помогло и сообщение появляется все равно, то в случае когда ваш компьютер находится на гарантии, это является поводом для обращения в гарантийный отдел. Так как все остальные действия при попытке избавится от CPU over voltage error приведут к потере гарантии.
Следующим действием будет перепрошивка BIOS. Как это делается мы не будем расписывать в данной статье, так как если вы этого ни разу не делали, то лучше доверить данную процедуру опытному пользователю.
Замена блока питания также порой помогает в решении данной проблемы. Причем лучше не сразу покупать новый блок, а попробовать поставить другой, заведомо рабочий, одолжив его у друзей или знакомых чтобы проверить исчезнет ли с ним сообщение CPU over voltage error.
Пример экрана с сообщением CPU over voltage error
Если ничего не помогает, то скорее всего вы имеете физические проблемы с материнской платой или датчиками вольтажа на ней (процессоре) и здесь вам нужно решать менять ли плату или продолжать пользоваться компьютером, каждый раз нажимая кнопку F1/F2 при появлении сообщения CPU over voltage error. Ведь известно немало случаев, когда компьютеры работали годами с сообщением о неправильном напряжении на процессоре.
Funksjoner
En HPET-brikke består av en 64-biters opp-teller ( hovedteller ) som teller med en frekvens på minst 10 MHz, og et sett med (minst tre, opptil 256) komparatorer. Disse komparatorene er 32- eller 64-biters brede. HPET er programmert via et minnekartet I/O -vindu som kan oppdages via Advanced Configuration and Power Interface (ACPI). HPET -kretsen i moderne PCer er integrert i southbridge -brikken .
Hver komparator kan generere et interrupt når de minst signifikante bitene er lik de tilsvarende bitene i 64-biters hovedtellerverdi. Komparatorene kan settes i ett-skudd eller periodisk modus, med minst én komparator som støtter periodisk modus og alle støtter ett-skudd-modus. I one-shot-modus utløser komparatoren en avbrudd en gang når hovedtelleren når verdien som er lagret i komparatorens register, mens i den periodiske modusen avbrytes avbruddene med angitte intervaller.
Komparatorer kan drives av operativsystemet, f.eks. For å gi en tidtaker per CPU for planlegging, eller av programmer.
Hyper kit mode что это?

Короткий мануал — как реализовать поддержку загрузочного NVMe SSD на старых материнских платах с Legacy BIOS и с использованием Clover (для любых ОС). По следам вот этого поста, где на мой взгляд, решение не так изящно и не для всех BIOS & OS.
Суть проблемы
Старые BIOS не видят новые NVMe SSD, в отличии от EFI (UEFI). Современные ОС эти диски, как правило, видят, и после загрузки ОС работать с диском можно, а вот старый BIOS нет, следовательно, загрузиться с нового быстрого диска не получится. Ну, потому что нельзя дать команду на загрузку тому, чего не видно.
Прелюдия
NVMe SSD диск, как правило, имеет разъем М.2, и работает как бы на прямую с процессором, по шине PCI-E. Поэтому если на вашей материнской плате нет разъема М.2, то для начала рекомендуется обзавестись переходником PCI-E >> М.2, или PCI-E RAID контроллером для SSD формата М.2.
Существует немного продвинутых NVMe SSD дисков, которые имеют на борту собственные эмулятор Legacy устройства. Например Samsung 950 Pro имеет дополнительный rom для загрузки как Legacy устройство на старых BIOS. А вот вся серия EVO такой возможности не имеет.
Немного истории
Много лет назад, когда компания Intel стала поставлять Apple свои процессоры и компоненты для применения в Маках, возникла потребность предварительного тестирования железа на совместимость с MacOS. Тогда инженеры Intel написали хитрый загрузчик DUET, который представляет собой эмулятор UEFI, загружаемый поверх Legacy BIOS и позволяющий запускать операционные системы, требующие UEFI (MacOS, например).
Однако использовать DUET «напрямую» задача весьма не тривиальная (пример, или вот еще, б-ррр…), требующая массу ручных операций, зависящих от конкретного железа и ОС, и понимания того, что именно вы делаете.
В дальнейшем, DUET был взят за основу для нескольких проектов по созданию мульти-загрузчиков. Один из них Hackintosh — проект по установке последних MacOS на любые Intel, а в последствии и AMD машины. В результате развития Hackintosh появился многофункциональный загрузчик Clover (Клевер), который заточен, разумеется, под загрузку MacOS и Intel, но сейчас может с успехом применяться для загрузки чего угодно на, практически, чём угодно. Вот им, Клевером, мы и воспользуемся для решения нашей проблемы.
Clover Configurator
Клевер сам по себе настраивается тоже не абы как, и для того, чтобы как-то облегчить в дальнейшем процесс тюнинга, была выпущена настроечная утилита Clover Configurator, и множество мануалов по использованию. Но беда в том, что Clover Configurator работает только в MacOS, и на Windows вы его, в лучшем случае, запустите только в VmWare.
Web-конфигуратор для CloverНекоторые пользователи рекомендует воспользоваться вместо Clover Configurator web-конфигуратором для Clover. Правда не факт, что прессет для вашей MB будет в списке. А документация по Клеверу объемна и подробна. Но, попробуйте, а вдруг.
Так же ходят слухи (в комментах), что сам автор Клевера (SergeySlice) не рекомендует использовать Clover Configurator а рекомендует редактировать конфигурационный файл руками. Не пойдем этим путем… у нас лапки и Мастдай.
Boot Disk Utility (BDUtility.exe)
Специально для тех, у кого лапки, один русский энтузиаст написал утилиту BDUtility.exe, которая сама скачивает последний релиз Clover, делает необходимые минимальные настройки и записывает полученный образ на флешку. Не пугайтесь вырвиглазного сайта, утилита работает отлично
Параметры BIOS для разгона и повышения производительности
В данной статье приводится ряд параметров BIOS для «мягкого» повышения производительности и разгона. Принято параметры настроек искать в разделе Frequency/Voltage Control, но в зависимости от производителя материнской платы, параметры для разгона могут отличаться, и находится в разных разделах. Так, например,
для плат ASUS — это раздел JumperFree Configuration, для плат Gigabyte — МВ Intelligent Tweaker, для плат MSI — Cell Menu, для плат ABIT — SoftMenu Setup или Guru Utility
В любом случае необходимо ознакомится и инструкцией, которая идет в комплекте с материнской платой, и где описаны все параметры для данной платы.
Предупреждение: Неправильное изменение рабочих частот и напряжений может привести не только к неработоспособности системы, но и выходу отдельных компонентов платы.
Некоторые производители плат применяют технологию, когда в BIOS есть параметры для общего разгона, а не отдельных компонентов.
CPU Intelligent Accelerator 2 (C.I.A. 2 — технология динамического разгона) Доступные значения:
- Disabled — технология динамического разгона не используется
- Cruise, Sports, Racing, Turbo, Full Thrust — задает уровень ускорения процессора от 5 %(Cruise)до 19%(Full Thrust)
Тор Performance — настраивает систему на максимальную производительность Этот раздел есть только в некоторых платах от Gigabyte и он скрытый. Для его запуска нажмите CtrL+F1. Доступные значения:
- Еnabled — включен, будут повышены рабочие частоты системы и уменьшены тайминги оперативной памяти
- Disabled — Тор Performance отключен
Замечание: в свое время я пытался задействовать этот режим, но иногда система вылетала в синий экран
Пришлось отказаться, возможно стояли не качественные компоненты, поэтому применять этот параметр надо осторожно
Robust Graphics Booster — ускоряет работу видеосистемы, увеличивая тактовые частоты видеоадаптера в платах от Gigabyte. Доступные значения:
- Auto — видеосистема работает на тактовых частотах по умолчанию
- Fast, Turbo — видеосистема работает на повышенных частотах
Dynamic Overclocking (D.O.T. — технология динамического разгона для плат от MSI) Доступные значения:
- Private, Sergeant, Captain, Colonel, General, Commander — выбор одного из значений позволит задать уровень ускорения процессора от 1% — для Private, до 15% — для Commander
- Disabled — отключен
AI Overclocking, АI Tuning — параметр разгона для плат от ASUS. Доступные значения:
- Маnuаl — все параметры разгона изменяются вручную
- Auto — устанавливаются оптимальные параметры
- Stаndard — загружаются стандартные параметры
- Non-Delay Оvегсlосking System — технология динамического разгона
Overclock Options — определяет уровень разгона системы. Доступные значения:
- Overc1ock З %, Оvеrс1осk 5%, Overc1ock 8%, Overc1ock 10% — задает величину разгона системы в процентах от штатной частоты.
- Disabled — разгон не используется
Memory Performance Enhance, Performance Enhance, Performance Mode — повышает производительность оперативной памяти. Доступные значения:
- Fast, Turbo и Extreme — выбор уровня разгона. (Для разгона памяти, желательно ставить качественные комплектующие)
- Standard — разгон не используется
Auto DisabIe DIMM/PCI Frequency, Auto Detect DIMM/PCI Clk — используется для снижения электромагнитных помех от компонентов системной платы. Доступные значения:
- Disabled — режим снижения электромагнитного излучения отключен. Рекомендуется при разгоне.
- Enabled — ВIOS будет автоматически отключать неиспользуемые слоты РСI и оперативной памяти для снижения уровня электромагнитных излучений
Остальные параметры для ручного разгона требуют более осторожного применения, так как могут вывести из строя компоненты системной платы. Еще раз предупреждаю, что не используйте разгон, если в этом нет большой необходимости
Воспользуйтесь советами по оптимизации системы более безопасными способами.
Проблемы
HPET — это непрерывно работающий таймер, который ведет счет вверх, а не одноразовое устройство, которое ведет обратный отсчет до нуля, вызывает одно прерывание и затем останавливается. Поскольку HPET сравнивает фактическое значение таймера и запрограммированное целевое значение на равенство, а не на «больше или равно», прерывания могут быть пропущены, если целевое время уже прошло, когда значение компаратора записано в регистр микросхемы. В таком случае запланированное прерывание не только пропущено, но и фактически установлено далеко в будущее (примерно 2 32 или 2 64 отсчета). При наличии немаскируемых прерываний (таких как прерывание системного управления (SMI)), у которых нет жесткого верхнего предела времени выполнения, это состояние гонки требует длительных повторных проверок таймера после настройки и является трудным. чтобы полностью избежать. Сложности усугубляются, если значение компаратора не синхронизируется с таймером сразу, а задерживается на один или два тика, как это делают некоторые чипсеты.
Помимо упоминания описанного выше состояния гонки, в документе VMware также перечислены некоторые другие недостатки: «Спецификация не требует, чтобы таймер был особенно мелкозернистым, имел низкий дрейф или быстрое считывание. Некоторые типичные реализации запускают счетчик на около 18 МГц и требуется примерно такое же количество времени (1-2 мкс) для считывания HPET, что и для таймера ACPI. Наблюдались реализации, в которых регистр периода отключался на 800 частей на миллион или более ».
Запись зависшей проблемы с синим экраном Win10 на компьютере AMD из-за устаревшего драйвера высокоточного таймера событий (HPET)
y http-equiv=»Content-Type» content=»text/html;charset=UTF-8″>le=»margin-bottom:5px;»>Теги: IRQL NOT LESS OR EQUAL Синий экран KMODE EXCEPTION NOT HANDLED Сбой HPET (высокоточный таймер событий)
В последнее время модели AMD часто зависают и синий экран.Характеристики: условия высокой нагрузки, такие как игры, компьютер не имеет проблем; после определенного периода бездействия компьютер синий экран или сбои, мышь и клавиатура не реагируют, все интерфейсы зависают, и вы можете перезапустить, только нажав кнопку питания. Все несохраненные данные теряются.
В последнее время появилось два типа кодов синих экранов: один — IRQL NOT LESS OR EQUAL. Драйвер использует неверный адрес памяти. Второй тип — KMODE_EXCEPTION_NOT_HANDLED. В основном это происходит из-за устаревших или поврежденных файлов драйверов устройств.
Решение: Во-первых, не проблема с установкой драйверов периферийных устройств. Недавно был обновлен драйвер видеокарты. Может ли это быть основным драйвером системных компонентов? Кроме того, недавно было недавно установлено собственное программное обеспечение удаленного доступа Telecom. Будет ли оно несовместимо с системой Win10? (Из-за несовместимости с системой установщик телеком уже напомнил мне перейти на Win7, но я не могу этого сделать)
Вот решение
Узнайте способ поделиться с вами, во-первых, отключите обязательную подпись драйвера, чтобы решить некоторые проблемы с программным драйвером
Если синий экран смерти все еще появляется, это проблема основного драйвера, затем загрузите программное обеспечение для обновления драйвера Driver Reviver, обновите несколько устаревших драйверов, обратите особое внимание на компонент HPET (High Precision Event Timer),

 Я никогда не думал, что это проблема HPET. Этот очень важный системный компонент принадлежит набору микросхем южного моста. Я лично предполагаю, что он несовместим с последней версией драйвера видеокарты AMD, что также в определенной степени влияет на производительность чтения и записи SSD, что приводит к синему экрану смерти в режиме ожидания. В Интернете появляются спорадические сообщения
Я никогда не думал, что это проблема HPET. Этот очень важный системный компонент принадлежит набору микросхем южного моста. Я лично предполагаю, что он несовместим с последней версией драйвера видеокарты AMD, что также в определенной степени влияет на производительность чтения и записи SSD, что приводит к синему экрану смерти в режиме ожидания. В Интернете появляются спорадические сообщения
Но до сих пор есть предположения, почему нет синего экрана смерти при высокой нагрузке видеокарты? Еще нужно подумать.
Интеллектуальная рекомендация
ReactiveX Я только что закончил проект OC, который взял на себя недавно. После тщательного рассмотрения я решил использовать Swift из следующего проекта (Swift, который я изучил так долго, не использо…
Пакет данных мобильного приложения Fiddler advanced usage-grab https://www.cnblogs.com/wushuaishuai/p/9300262.html https://blog.csdn.net/u012808234/article/details/52767470(подробно) https://blog.csdn…
JMS (самая стабильная и последняя версия Spring-jms, интегрированная со средой Spring, — 5.1.3)** ПО промежуточного слоя для сообщений: ПО промежуточного слоя для сообщений использует эффективный и на…
…
вперед отjackiehffПодробное описание Java BigDecimal 1. Введение Заимствуя слова из книги «Эффективная Java», основные цели проектирования типов float и double связаны с научными и инженер…
Вам также может понравиться
Вот в основном узел для удаления замены изменения клона и другие операции Создать узел Вставьте узел Удалить узел Копировать узел Замена узла Узел посылки Операция атрибута Устано…
Это ключевое слово должно быть помещено в нестатический метод Это ключевое слово представляет собой, основное использование в программе имеет следующие аспекты: Используйте это ключевое слово для ссыл…
1. Регулярное выражение: мощный инструмент для сопоставления с образцом в строках. используется для проверки того, содержит ли строка определенную подстроку, замены совпавшей подстроки или извлечения …
В жизненном цикле потока Java есть несколько состояний. В классе Thread есть тип перечисления State, который определяет несколько состояний потока соответственно: NEW: После того, как поток созда…
Нажмите на синее слово вам! Удобное следующее чтение. Если у вас есть помощь, пожалуйста, чувствуйте немного, спасибо ~ Недавно 0 фундаментов при изучении национального алгоритма, поэтому я разделяю н…
Time Cycle
Specifies repeating intervals, which can be useful for starting process periodically, or for sending multiple reminders for overdue user tasks. A time cycle element can be in two formats. One option is the format of recurring , as specified by the standard.
Example (3 repeating intervals, each lasting 10 hours):
Additionally, you can specify a time cycle using cron expressions, the example below shows a trigger firing every 5 minutes, starting at full hour:
Please see the CronTrigger Tutorial for additional information about using cron expressions.
Note: The first symbol denotes seconds, not minutes as in normal Unix cron.
The recurring time duration option is better suited for handling relative timers, which are calculated in respect to some particular point in time (e.g., the time when a user task was started), while cron expressions can handle absolute timers — which is particularly useful for timer start events.
Modify a Time Cycle
A timer’s repeat cycle can be controlled via the REST API or by calling the ManagementService. By setting the due date of a timer, it is possible to change the point in time when a timer is executed.
Changes to one timer instance do not automatically affect subsequent timer instances. For example, a certain recurring timer produces a timer event every 30 minutes. If the due date of one timer event is changed (e.g. +15minutes), it would be executed 45 minutes after the previous timer. However, the following timer would follow the old pattern and would execute 15 minutes after the changed timer.
If the desired outcome is to calculate the due dates of all subsequent timers based on the changes made, then it is possible to pass a flag (when using the REST API) or use the following Java API method:
Initialization
The following is the procedure you need to perform to initialize main counter and comparators in order to receive interrupts.
General initialization: 1. Find HPET base address in ‘HPET’ ACPI table. 2. Calculate HPET frequency (f = 10^15 / period). 3. Save minimal tick (either from ACPI table or configuration register). 4. Initialize comparators. 5. Set ENABLE_CNF bit.
Timer N initialization: 1. Determine if timer N is periodic capable, save that information to avoid re-reading it every time. 2. Determine allowed interrupt routing for current timer and allocate an interrupt for it.
I am enabling the timers only when I actually use them, so there’s no «real» initialization of comparators here.
Keep in mind that allowed interrupt routing may be insane. Namely, you probably want to use some of ISA interrupts — or, at very least, be able to use them at one point unambiguously. Last time I checked VirtualBox allowed mappings for HPET, it allowed every timer to be routed to any of 32 I/O APIC inputs present on the system. Knowing how buggy hardware can be, I wouldn’t be too surprised if there exists a PC with HPET claiming that input #31 is allowed, when there are only 24 I/O APIC inputs. Be aware of this when choosing interrupt routing for timers.
Некоторые правила разгона контроллера памяти
С этим компонентом нужно быть вдвойне осторожным. Он гораздо уязвимее центрального процессора. И это не шутки. Если переборщить с частотой, то контроллер тут же накроется. Увеличивать рабочую частоту шины памяти и контроллера без крайней нужды не рекомендуется. Прироста производительности это даст немного, но поставит под угрозу весь компьютер. Ведь от перегрева может сгореть контроллер, который, в свою очередь, затронет саму шину и материнскую плату. В итоге ремонт может вылиться в довольно приличную сумму. И уж особенно не стоит заниматься таким делом в ноутбуках. В корпусе лэптопа и без того нет места для нормального циркулирования воздуха (и один несчастный вентилятор здесь не поможет). А если еще увеличить напряжение того или иного компонента, то он сгорит быстрее, чем вы включите ноутбук. Не стоит так рисковать
Если центральный процессор еще как-то можно разгонять таким способом (с сугубой осторожностью), то контроллер памяти лучше вовсе не трогать. Он не обладает такой крутой защитой, как процессор
Да и кулер от него далеко.

Using timers
One-shot mode
To enable one-shot mode:
// "time" is time in femtoseconds from now to interrupt
if (time < COUNTER_CLK_PERIOD)
{
time = adjust_time(time);
}
write_register_64(timer_configuration(n), (ioapic_input << 9) | (1 << 2));
write_register_64(timer_comparator(n), read_register(main_counter) + time);
I hope the above code is obvious. If it’s not, please analyze the meaning of specific fields in registers used above.
Periodic mode
To enable periodic mode:
// "time" is time in femtoseconds from now to interrupt
if (time < COUNTER_CLK_PERIOD)
{
time = adjust_time(time);
}
write_register_64(timer_configuration(n), (ioapic_input << 9) | (1 << 2) | (1 << 3) | (1 << 6));
write_register_64(timer_comparator(n), read_register(main_counter) + time);
write_register_64(timer_comparator(n), time);
This snippet requires some more comments.
Bit 2 is the same as above, Interrupt Enable. Bit 3 is also quite straightforward — 1 means periodic timer. But we’ve also set bit 6. Why?
Let’s take a look at quote from the HPET specification:
This means that next write to timer N comparator register will have the usual meaning, while second next write will write directly to the accumulator. I believe that the wording could’ve been much better.
Определение NB Frequency
Есть в БИОСе и такая штука, как CPU NB Frequency. Что это такое? Параметр NB отвечает за рабочую частоту контроллера памяти. Чем она выше, тем быстрее работает память. Но проблема в том, что постоянная работа на повышенных частотах быстро приводит к износу контроллера. И это нехорошо. Многие профессионалы, конечно, советуют выставлять этот параметр на максимум, мол, «я сто раз так делал, ничего не будет». Но здесь вопрос здравого смысла и логики, а не того, кто, сколько раз и как это делал. Повышенные частоты в любом случае снижают жизненный цикл контроллера. Это непреложные основы физики. Так что к утверждениям «гуру» стоит относиться с известной долей скептицизма. Если вы хотите, чтобы ваш компьютер проработал долго, то не играйтесь с частотами. Так будет лучше. И не стоит выше положенных пределов изменять значение CPU Frequency. Что это снижает срок службы отдельных компонентов — понятно. Но повышенны частоты могут привести и к мгновенному перегреву и выходу из строя процессора. Оно вам надо?

